Predicting Navigation Performance Using Componential Tasks

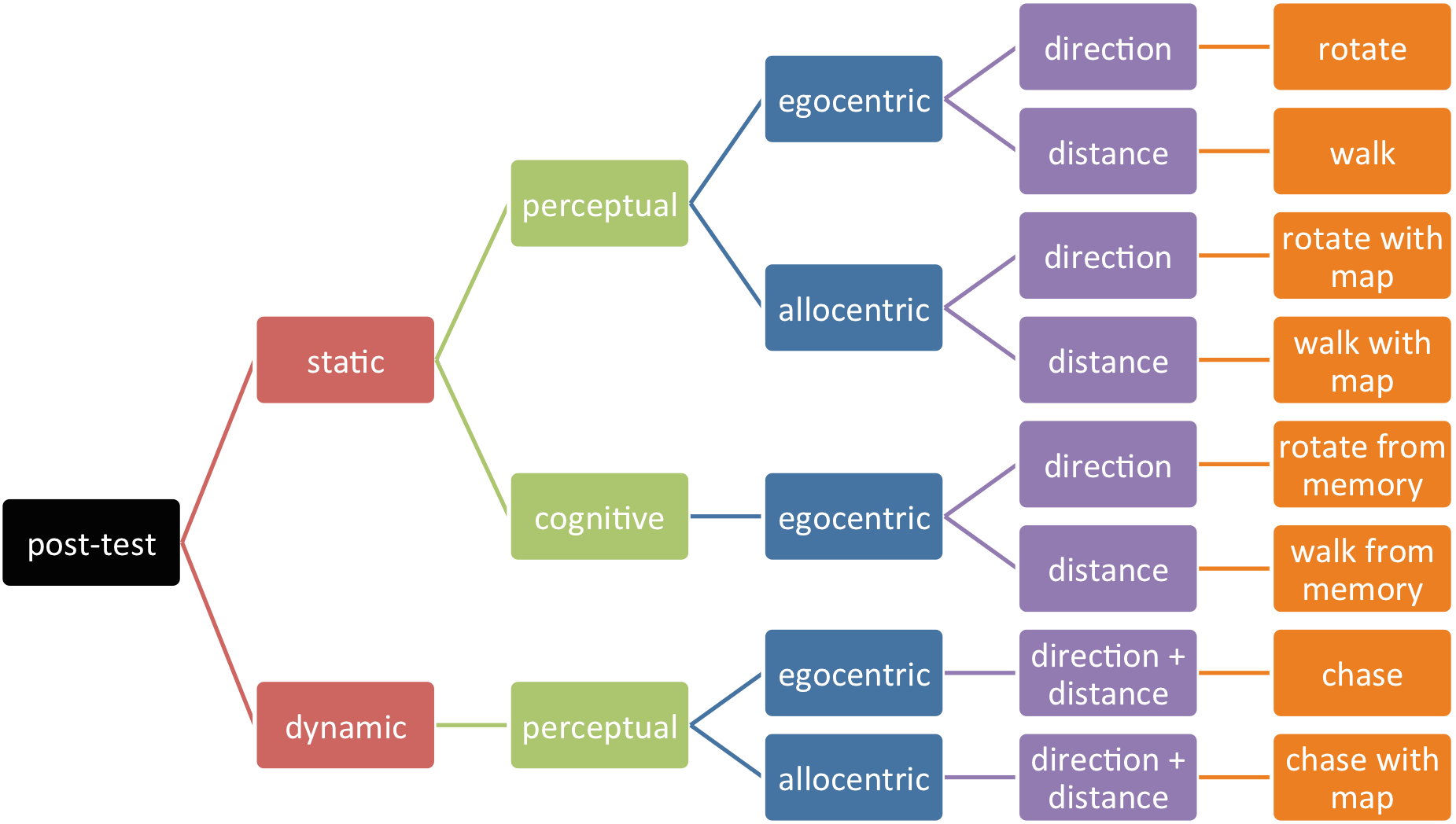
Several researchers have attempted to bridge different parts of the spatial cognition literature by proposing two general systems of spatial representation (e.g., Allen & Haun, 2004; Avraamides & Kelly, 2008; Burgess, 2006). However, different two-systems theories do not overlap perfectly. The present project builds a theoretical framework that specifies the relations among different two-systems theories and attempts to predict navigation performance using a combination of simple tasks derived from this framework. Our preliminary evidence suggests that dynamic tasks (e.g., chasing a moving object) may predict navigation performance better than the entire framework (after accounting for the complexity of the models). We interpret this finding as reflecting the importance of locomotion during navigation through a familiar virtual environment.